|
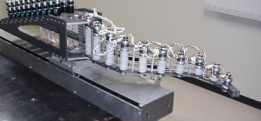
モレイ型多関節ロボットアームは、海底に住むうつぼ(モレイ)のようなロボットアームです。アームの基台部に強力なスライダーを装備したものです。アームを運動させる際に出来る限りスライダーの駆動力を利用し、アームの関節機構を軽量化を図ります。
このような強力なスライダーを持つ機構の有効性を引き出すために、駆動制御法として、アームを軌道上に拘束しながら引き込み、押しだし動作を行なう駆動制御法などがあります。
モレイ型多関節ロボットアームの特徴
- 駆動力の大部分をスライダーに負担させることにより、アームの関節機構の負担を軽減し、アームの軽量化ができる。
- スライダー部が格納器としても機能する。そのために、与えられた作業に必要な長さのアームを引き出した状態で作業を行なう事が可能になる。
- アームの引き込み、押しだし動作を同一の軌道上を辿られることが出来る。アーム全体を振り回さないために、障害物回避特性が高く、また水中では流体抵抗を軽減できる。
© 2001-2005 Ma & Inoue Laboratory, All Rights Reserved