| お知らせ |
本ページに掲載している内容は,平成17年9月以前のものです.平成17年10月に馬書根教員が立命館大学へ異動となったのに伴い,平成17年10月以降,研究テーマを変更しました.現在の内容はこちらです.
馬・井上研究室(生物知能機械学研究室)では,ゾウの鼻型ロボットアームやモレイ(ウツボ)型ロボットアーム,ヘビ型移動ロボット,四脚移動ロボットなど, 生物の運動や知能をモデルとした新しい形態のロボットや,力覚をテーマとした入出力インタフェースについての研究・開発を行っています.
現在,ロボットはさまざまな産業分野において活躍していますが,ほとんどのロボットは与えられた動作をこなすための最低限必要な関節数しか持ち合わせていません.その為仕事の内容や作業環境が変更された場合,新たなロボットの設計や大幅な改造が必要となる可能性があります.
一方生物の世界において,特にゾウの鼻,ヘビ,ウツボなどは,それらが持つ沢山の関節を利用することにより,狭所での作業や,パワー消費の少ない滑らかな動作を外部環境に適応して臨機応変に行うことができます.
この様な事から,これらの生物をモデルとした新しい形態のロボットは,ロボットの持つ可能性を更に広げてくれるものと信じて,私達は日々研究しています.
全体的な概要 [PDF]個別の研究課題
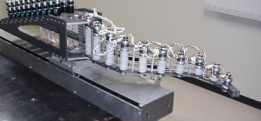
〜 ゾウの鼻型多関節ロボットアーム 〜
ゾウ鼻の動き (MPEG)
〜 モレイ型多関節ロボットアーム 〜
モレイの動き (MPEG)

〜 ヘビ型移動ロボット 〜
[ 2次元型 ]
1自由度ヘビの動き (MPEG)
[ 3次元型 ]
・2自由度関節
2自由度ヘビの動き (MPEG)
・3自由度関節
3自由度ヘビの動き (MPEG)
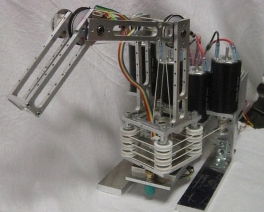
〜 四脚移動ロボット 〜
四足の動き (MPEG)




[ シリアルリンク機構 ]
WiSH-1の動き (MPEG)
[ シリアルリンク機構 + 軸変換機構 ]
WiSH-2の動き (MPEG)

CPG入力を用いたヘビの動き (MPEG)
ロボットアーム最適制御の解説
[ 最短時間制御 ]
[ 最小エネルギー制御 ]
マルチロボット協調作業の解説
[ 災害時における異種異型ロボットの協調作業 ]
ページトップ / ホーム
© 2001-2005 Ma & Inoue Laboratory, All Rights Reserved